Introduction
In pc imaginative and prescient, completely different strategies for reside object detection exist, together with Quicker R-CNN, SSD, and YOLO. Every approach has its limitations and benefits. Whereas Quicker R-CNN could excel in accuracy, it might not carry out as effectively in real-time eventualities, prompting a shift in the direction of the YOLO algorithm.
Object detection is key in pc imaginative and prescient, enabling machines to determine and find objects inside a body or display screen. Through the years, varied object detection algorithms have been developed, with YOLO rising as one of the crucial profitable. Not too long ago, YOLOv8 has been launched, additional enhancing the algorithm’s capabilities.
On this complete information, we discover three outstanding object detection algorithms: Quicker R-CNN, SSD (Single Shot MultiBox Detector), and YOLOv8. We talk about the sensible features of implementing these algorithms, together with organising a digital atmosphere and creating a Streamlit utility.
Studying Goal
- Perceive Quicker R-CNN, SSD, and YOLO, and analyze the variations between them.
- Achieve sensible expertise in implementing reside object detection techniques utilizing OpenCV, Supervision, and YOLOv8.
- Understanding the picture segmentation mannequin utilizing the Roboflow annotation.
- Create a Streamlit utility for a simple consumer interface.
Let’s discover methods to do picture segmentation with YOLOv8!
Desk of contents
This text was printed as part of the Information Science Blogathon.
Quicker R-CNN
Quicker R-CNN (Quicker Area-based Convolutional Neural Community) is a deep learning-based object detection algorithm. It’s evaluated utilizing the R-CNN and Quick R-CNN frameworks and might be thought of an extension of Quick R-CNN.
This algorithm introduces the Area Proposal Community (RPN) to generate area proposals, changing the selective search utilized in R-CNN. The RPN shares convolutional layers with the detection community, permitting environment friendly end-to-end coaching.
The generated area proposals are then fed right into a Quick R-CNN community for bounding field refinement and object classification.
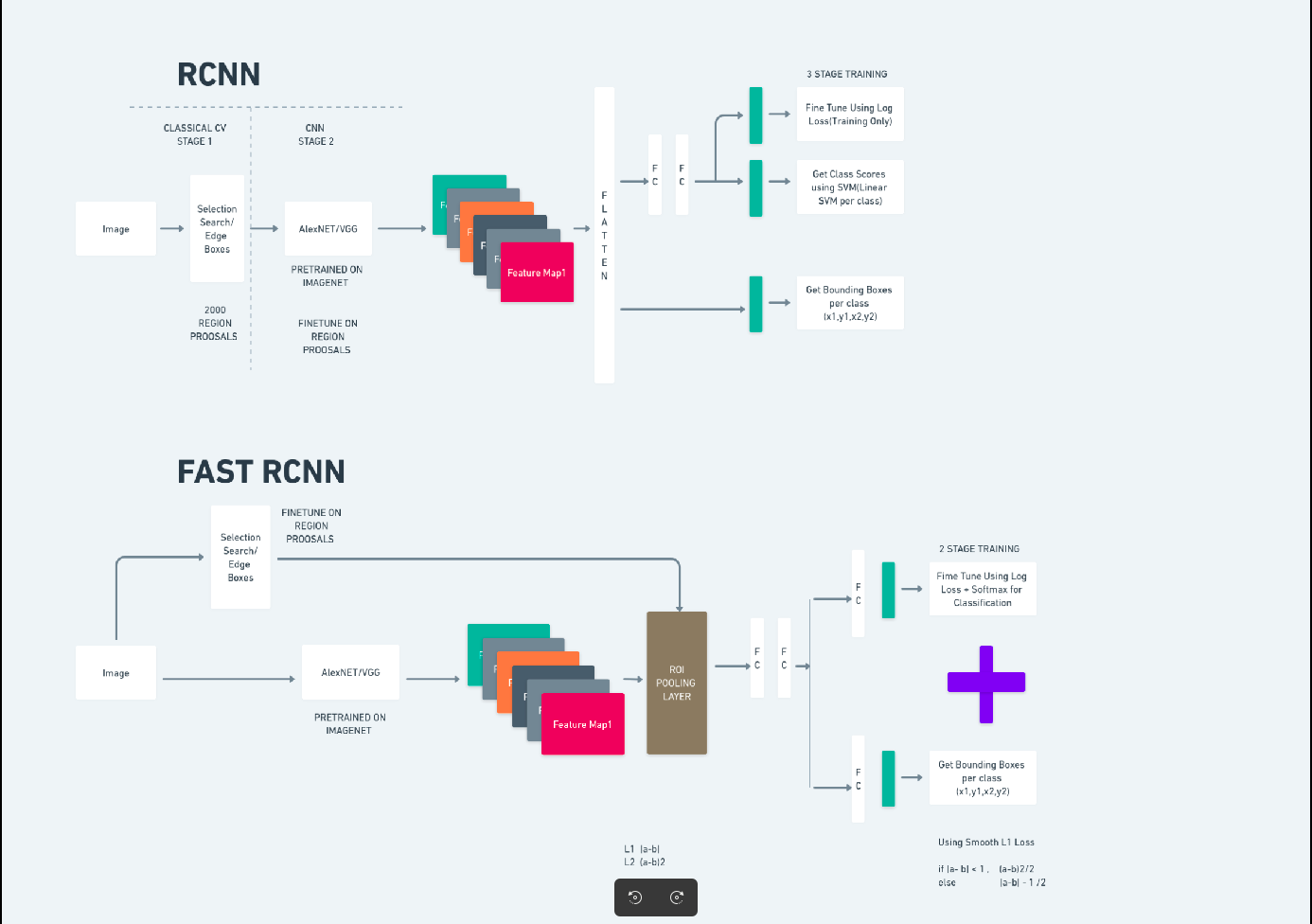
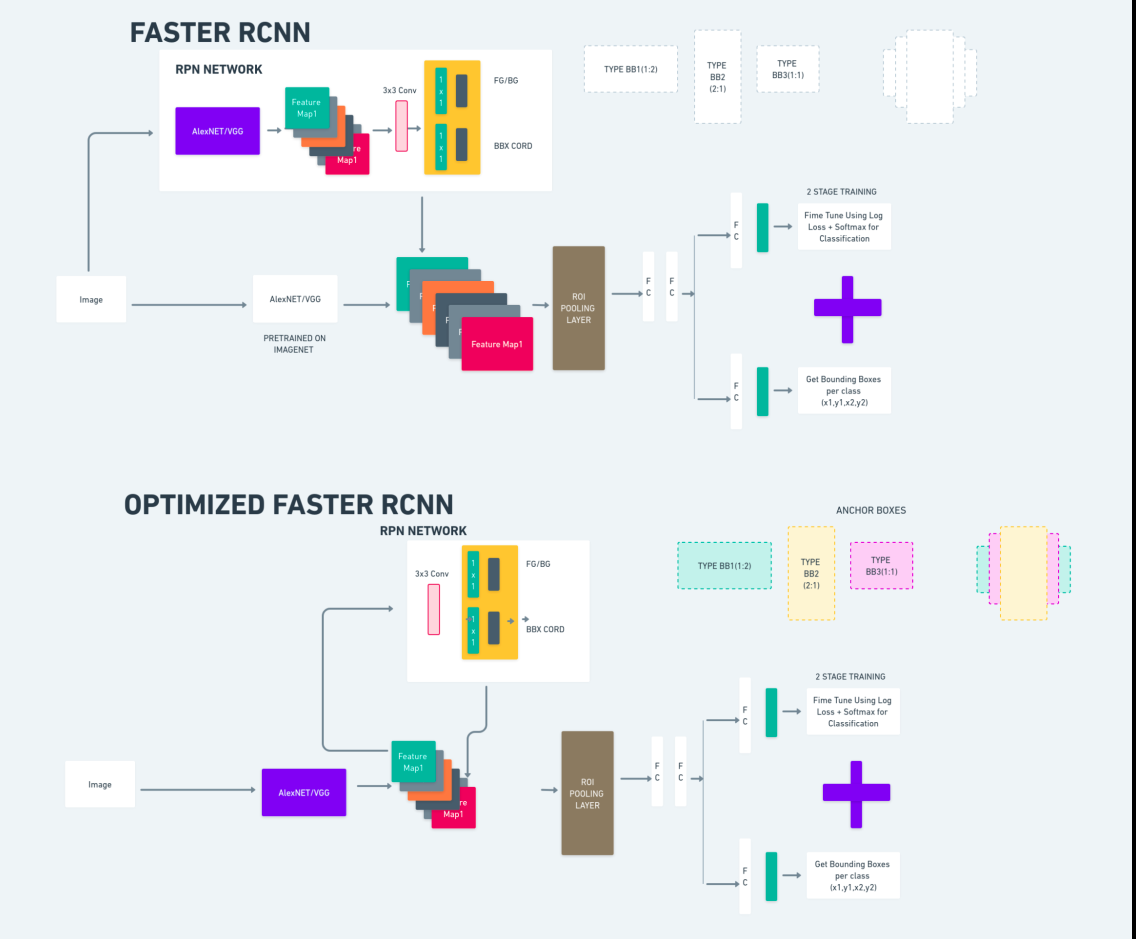
The diagram above illustrates the Quicker R-CNN household comprehensively and is simple to grasp for evaluating every algorithm.
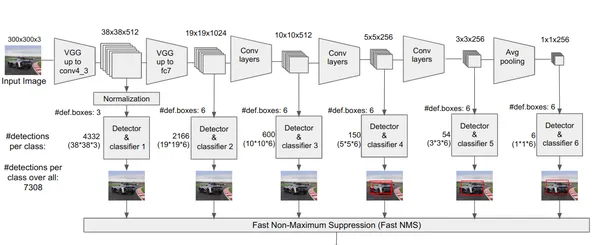
Single Shot MultiBox Detector(SSD)
The Single Shot MultiBox Detector (SSD) is standard in object detection and primarily utilized in pc imaginative and prescient duties. Within the earlier methodology, Quicker R-CNN, we adopted two steps: step one concerned the detection half and the second concerned regression. Nonetheless, with SSD, we solely carry out a single detection step. SSD was launched in 2016 to deal with the necessity for a quick and correct object detection mannequin.
SSD has a number of benefits over earlier object detection strategies like Quicker R-CNN:
- Effectivity: SSD is a single-stage detector, that means it instantly predicts bounding packing containers and sophistication scores with out requiring a separate proposal technology step. This makes it quicker in comparison with two-stage detectors like Quicker R-CNN.
- Finish-to-Finish Coaching: SSD might be skilled end-to-end, optimizing each the bottom community and the detection head collectively, which simplifies the coaching course of.
- Multi-scale Characteristic Fusion: SSD operates on function maps at a number of scales, permitting it to detect objects of various sizes extra successfully.
SSD strikes a very good stability between velocity and accuracy, making it appropriate for real-time functions the place each efficiency and effectivity are essential.
You Solely Look As soon as(YOLOv8)
In 2015, You Solely Look As soon as (YOLO) was launched as an object-detection algorithm in a analysis paper by Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali Farhadi. YOLO is a single-shot algorithm that instantly classifies an object in a single cross by having just one neural community predict bounding packing containers and sophistication possibilities utilizing a full picture as enter.
Now, Let’s perceive YOLOv8 as state-of-the-art developments in real-time object detection with improved accuracy and velocity. YOLOv8 lets you leverage pre-trained fashions, that are already skilled on an enormous dataset comparable to COCO (Frequent Objects in Context). Picture segmentation gives pixel-level details about every object, enabling extra detailed evaluation and understanding of the picture content material.
Whereas picture segmentation can be computationally costly, YOLOv8 integrates this methodology into its neural-network structure, permitting for environment friendly and correct object segmentation.
Working Precept of YOLOv8
YOLOv8 works by first dividing the enter picture into grid cells. Utilizing these grid cells, YOLOv8 predicts the bounding packing containers (bbox) with possibilities of sophistication.
Afterwards, YOLOv8 employs the NMS algorithm to cut back overlapping. For example, if there are a number of vehicles current within the picture leading to overlapping bounding packing containers, the NMS algorithm helps in decreasing this overlap.
Distinction between variants of Yolo V8: YOLOv8 is out there in three variants: YOLOv8, YOLOv8-L, and YOLOv8-X. The principle distinction between the variants is the scale of the spine community. YOLOv8 has the smallest spine community, whereas YOLOv8-X has the most important spine community.
Distinction between Quicker R-CNN, SSD, and YOLO
| Side | Quicker R-CNN | SSD | YOLO |
|---|---|---|---|
| Structure | Two-stage detector with RPN and Quick R-CNN | Single-stage detector | Single-stage detector |
| Area Proposals | Sure | No | No |
| Detection Velocity | Slower in comparison with SSD and YOLO | Quicker in comparison with Quicker R-CNN, slower than YOLO | Very quick |
| Accuracy | Typically greater accuracy | Balanced accuracy and velocity | Respectable accuracy, particularly for real-time functions |
| Flexibility | Versatile, can deal with varied object sizes and side ratios | Can deal with a number of scales of objects | Can battle with correct localization of small objects |
| Unified Detection | No | No | Sure |
| Velocity vs Accuracy Tradeoff | Typically sacrifices velocity for accuracy | Balances velocity and accuracy | Prioritizes velocity whereas sustaining respectable accuracy |
What’s Segmentation?
As we all know segmentation means we’re dividing the big picture into smaller teams primarily based on sure traits. Let’s perceive picture segmentation which is the pc imaginative and prescient approach used to partition a picture into completely different a number of segments or areas. As the pictures are product of pixels and In Picture segmentation, pixels are grouped collectively in line with the similarity in color, depth, texture, or different visible properties.
For instance, if a picture incorporates timber, vehicles, or individuals then the picture segmentation goes to divide the picture into completely different lessons which symbolize significant objects or elements of the picture. Picture segmentation is broadly utilized in completely different fields like medical imaging, satellite tv for pc picture evaluation, object recognition in pc imaginative and prescient, and extra.

Within the segmentation half, we initially create the primary YOLOv8 segmentation mannequin utilizing Robflow. Then, we import the segmentation mannequin to carry out the segmentation activity. The query arises: why will we create the segmentation mannequin when the duty could possibly be accomplished with a detection algorithm alone?
Segmentation permits us to acquire the complete physique picture of a category. Whereas detection algorithms concentrate on detecting the presence of objects, segmentation gives a extra exact understanding by delineating the precise boundaries of objects. This results in extra correct localization and understanding of the objects current within the picture.
Nonetheless, segmentation sometimes includes greater time complexity in comparison with detection algorithms as a result of it requires extra steps comparable to separating annotations and creating the mannequin. Regardless of this disadvantage, the elevated precision supplied by segmentation can outweigh the computational value in duties the place exact object delineation is essential.
Step-by-Step Dwell Detection and Picture Segmentation With YOLOv8
On this idea we ae exploring the steps for making a digital atmosphere utilizing conda, activating the venv and putting in the necessities packages utilizing pip. first creating the conventional python script then we create the streamlit utility.
Step1: Create a Digital Surroundings utilizing Conda
conda create -p ./venv python=3.8 -yStep2: Activate the Digital Surroundings
conda activate ./venv
Step3: Create necessities.txt
Open the terminal and paste the beneath script:
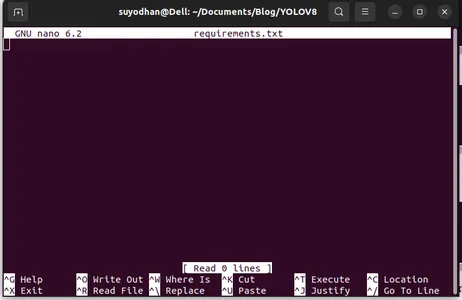
contact necessities.txtStep4: Use the Nano Command and Edit the necessities.txt
After creating the necessities.txt wirte the next command for enhancing necessities.txt
nano necessities.txtAfter operating the above script you may see this UI.
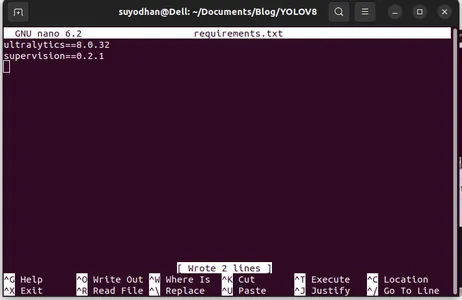
Write her required packages.
ultralytics==8.0.32
supervision==0.2.1
streamlitThen press the “ctrl+o”(this command saving enhancing half) then Press the “enter”
After urgent the “Ctrl+x”. you may exit the file. and going to the primary path.
Step5: Putting in the necessities.txt
pip set up -r necessities.txtStep6: Create the Python Script
Within the terminal write the next script or we are able to say command.
contact principal.pyAfter creating principal.py open the vs code you employ the command write in terminal,
code Step7: Writing the Python Script
import cv2
from ultralytics import YOLO
import supervision as sv # Outline the body width and top for video seize
frame_width = 1280
frame_height = 720 def principal(): # Initialize video seize from default digital camera cap = cv2.VideoCapture(0) cap.set(cv2.CAP_PROP_FRAME_WIDTH, frame_width) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, frame_height) # Load YOLOv8 mannequin mannequin = YOLO("yolov8l.pt") # Initialize field annotator for visualization box_annotator = sv.BoxAnnotator( thickness=2, text_thickness=2, text_scale=1 ) # Primary loop for video processing whereas True: # Learn body from video seize ret, body = cap.learn() # Carry out object detection utilizing YOLOv8 end result = mannequin(body, agnostic_nms=True)[0] detections = sv.Detections.from_yolov8(end result) # Put together labels for detected objects labels = [ f"{model.model.names[class_id]} {confidence:0.2f}" for _, confidence, class_id, _ in detections ] # Annotate body with bounding packing containers and labels body = box_annotator.annotate( scene=body, detections=detections, labels=labels ) # Show annotated body cv2.imshow("yolov8", body) # Verify for give up key if cv2.waitKey(1) & 0xFF == ord('q'): break # Launch video seize cap.launch() cv2.destroyAllWindows() if __name__ == "__main__": principal()
After operating this command you may see the your digital camera is open and detecting a part of you. like gender and background elements.
Step7: Create streamlit App
import cv2
import streamlit as st
from ultralytics import YOLO
import supervision as sv # Outline the body width and top for video seize
frame_width = 1280
frame_height = 720 def principal(): # Set web page title and header st.title("Dwell Object Detection with YOLOv8") # Button to begin the digital camera start_camera = st.button("Begin Digital camera") if start_camera: # Initialize video seize from default digital camera cap = cv2.VideoCapture(0) cap.set(cv2.CAP_PROP_FRAME_WIDTH, frame_width) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, frame_height) # Load YOLOv8 mannequin mannequin = YOLO("yolov8l.pt") # Initialize field annotator for visualization box_annotator = sv.BoxAnnotator( thickness=2, text_thickness=2, text_scale=1 ) # Primary loop for video processing whereas True: # Learn body from video seize ret, body = cap.learn() # Carry out object detection utilizing YOLOv8 end result = mannequin(body, agnostic_nms=True)[0] detections = sv.Detections.from_yolov8(end result) # Put together labels for detected objects labels = [ f"{model.model.names[class_id]} {confidence:0.2f}" for _, confidence, class_id, _ in detections ] # Annotate body with bounding packing containers and labels body = box_annotator.annotate( scene=body, detections=detections, labels=labels ) # Show annotated body st.picture(body, channels="BGR", use_column_width=True) # Verify for give up key if cv2.waitKey(1) & 0xFF == ord('q'): break # Launch video seize cap.launch() if __name__ == "__main__": principal()
On this script, we’re creating the streamlit utility and creating the button in order that after urgent the button your machine digital camera is open and detecting the half within the body.
Run this script utilizing this command.
streamlit run app.py
# first create the app.py then paste the above code and run this script.After operating the above command suppose you bought the reach-out error like,
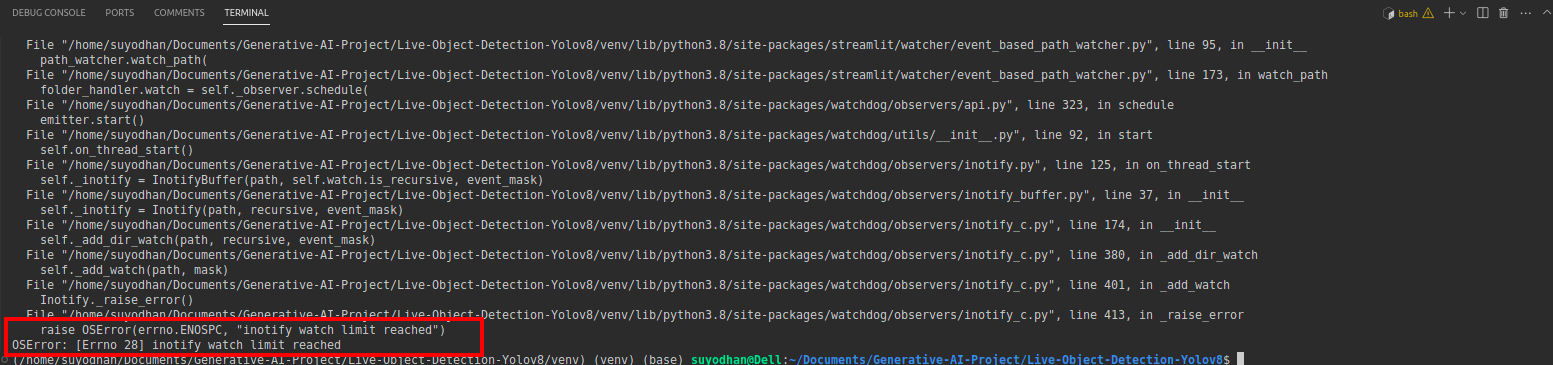
then press this command,
sudo sysctl fs.inotify.max_user_watches=524288After hitting the command you need to write your password by as a result of we’re utilizing the sudo command sudo is god:)
Run the script once more. and you’ll see the streamlit utility.
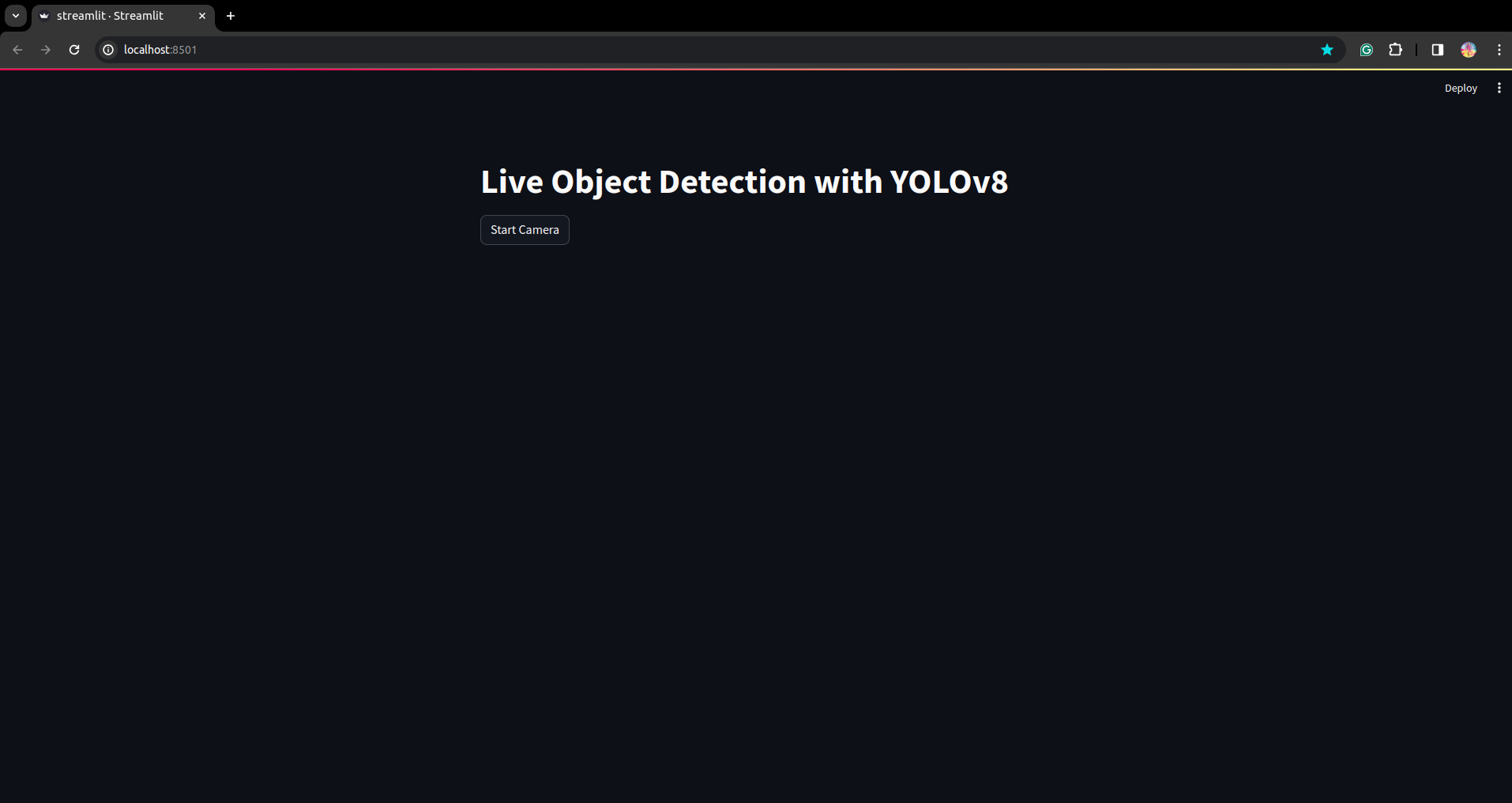
Right here we are able to create a profitable reside detection utility within the subsequent half we’ll see the segmentation half.
Steps For Annotation
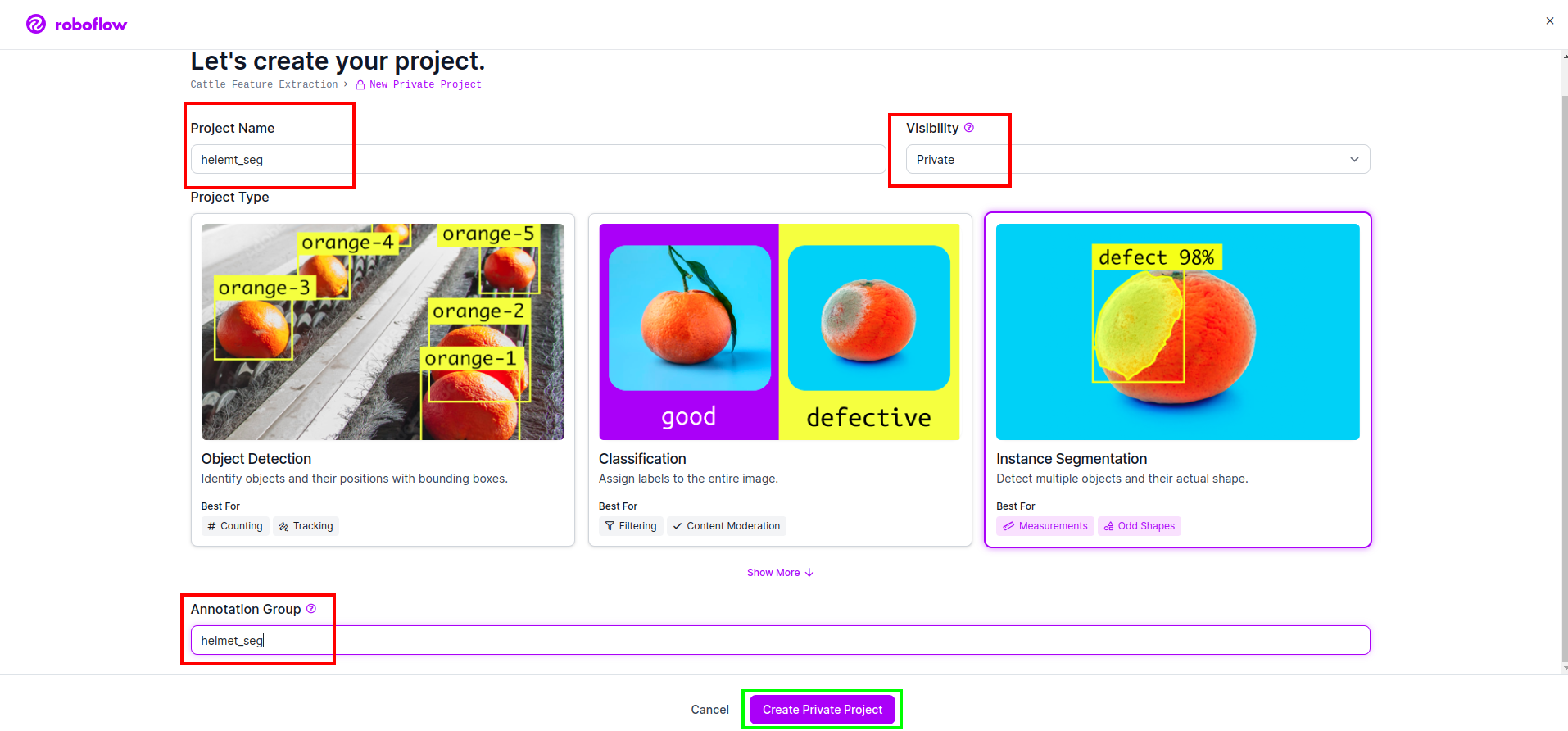
Step1: Roboflow Setup
After sigin the “Create Venture”. right here you may create the undertaking and annotation group.
Step2: Dataset Downloading
Right here we contemplate the straightforward instance however you need to apply it to your downside assertion so I’m utilizing right here duck dataset.
Go the this hyperlink and obtain the duck dataset.
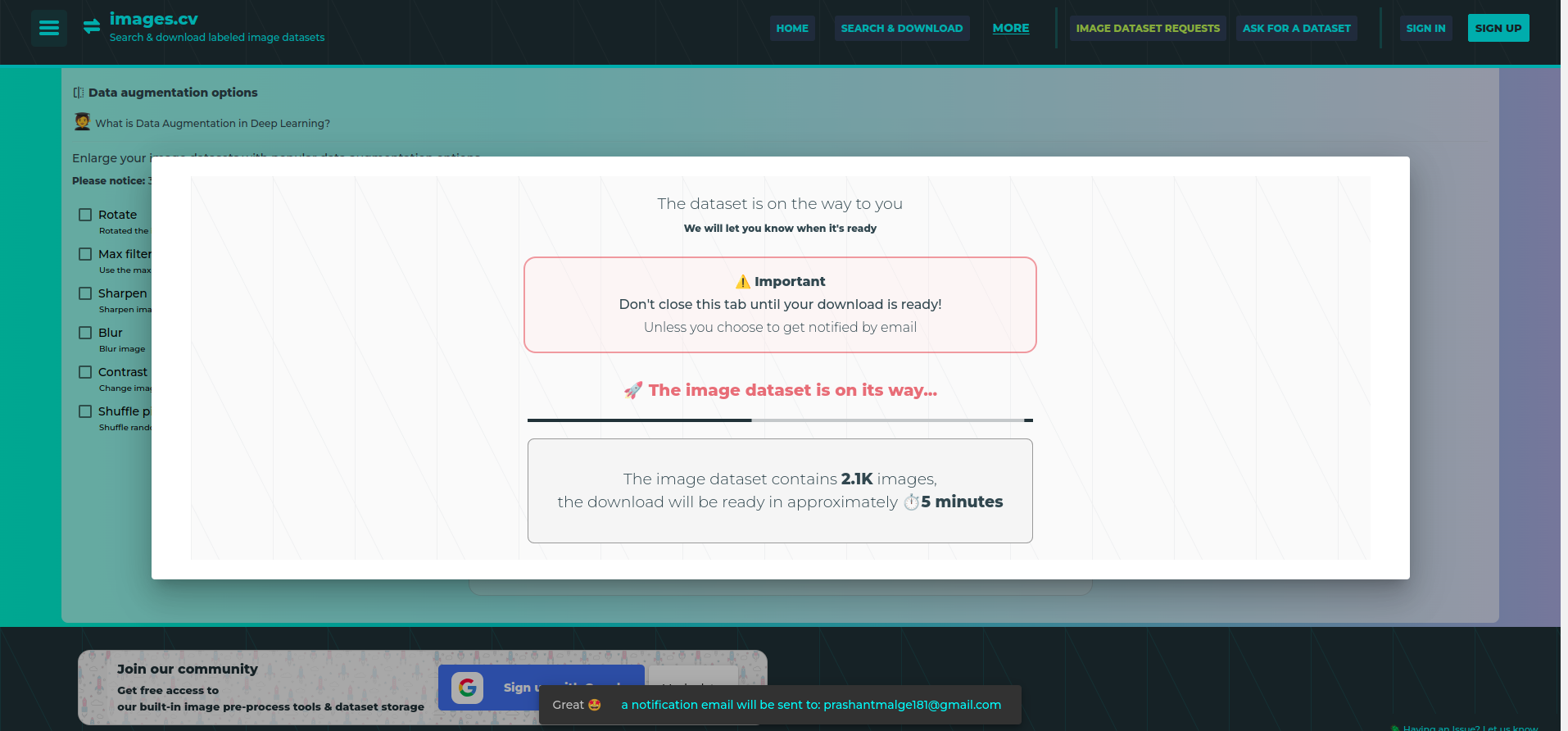
Extract the folder there you may see the three folders: practice, take a look at and val.
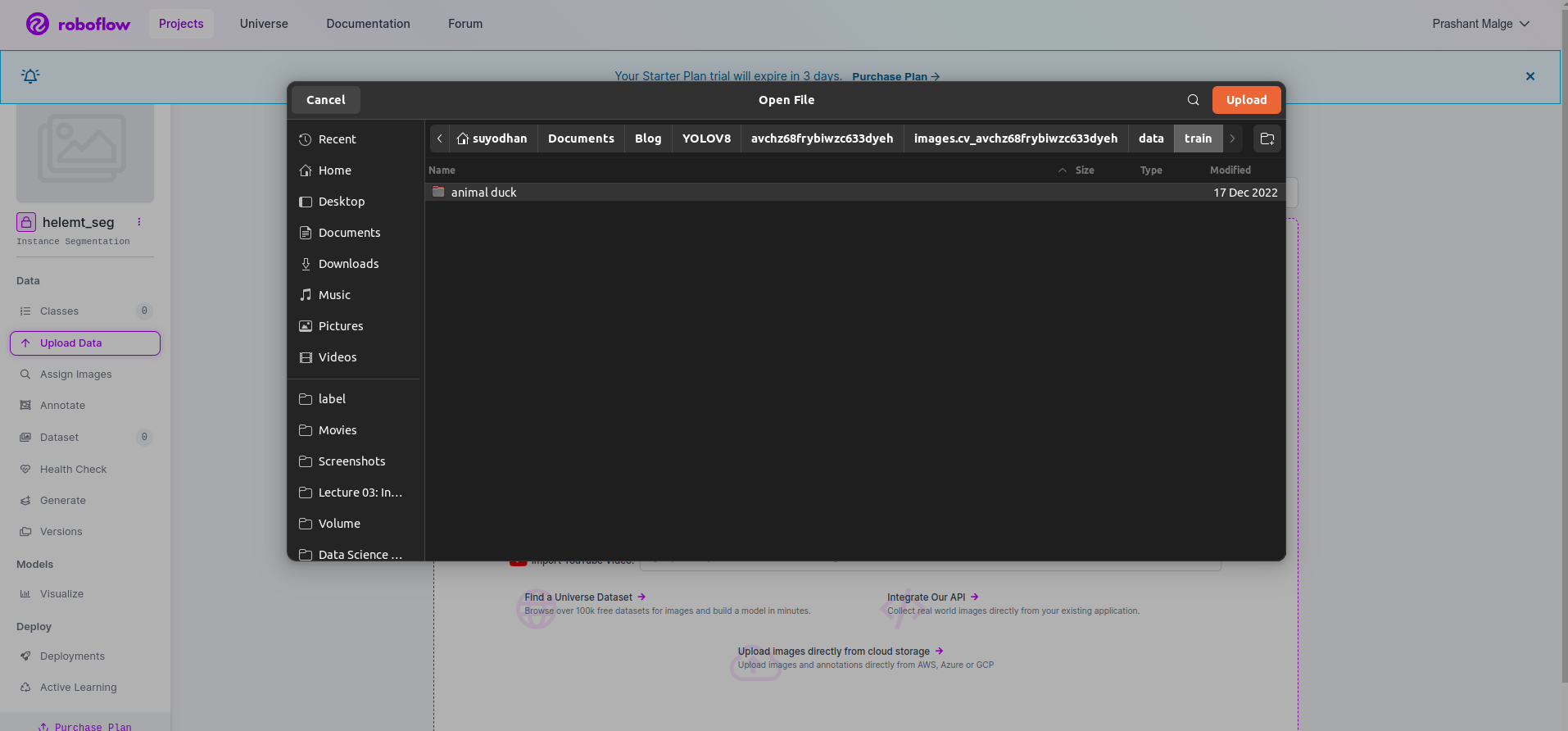
Step3: Importing the Dataset on roboflow
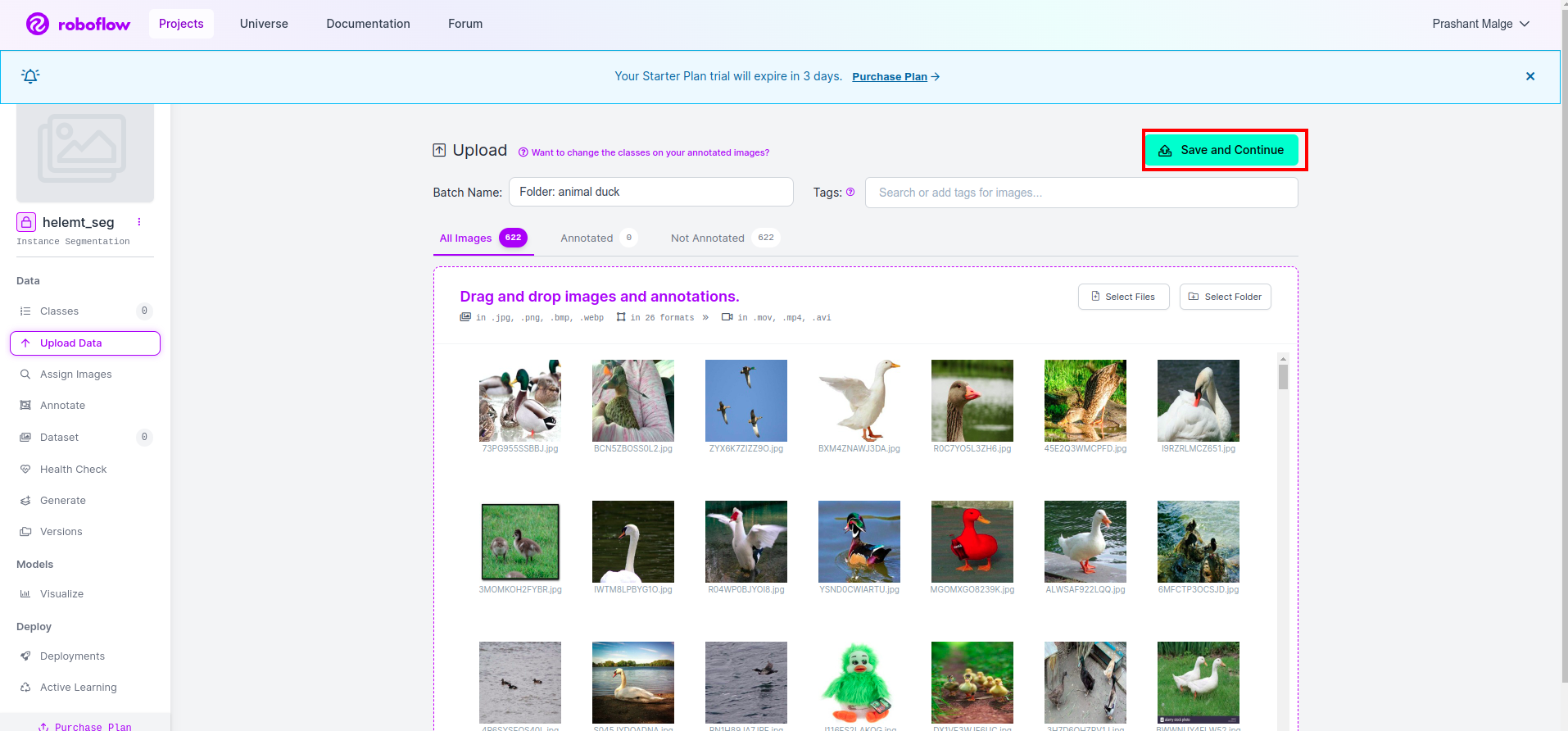
After creating the undertaking in roboflow you may see this UI right here you may add your dataset so are importing solely practice half photos choose the “choose folder” possibility.
Then click on the “save and proceed” possibility as I mark in a pink rectangle field
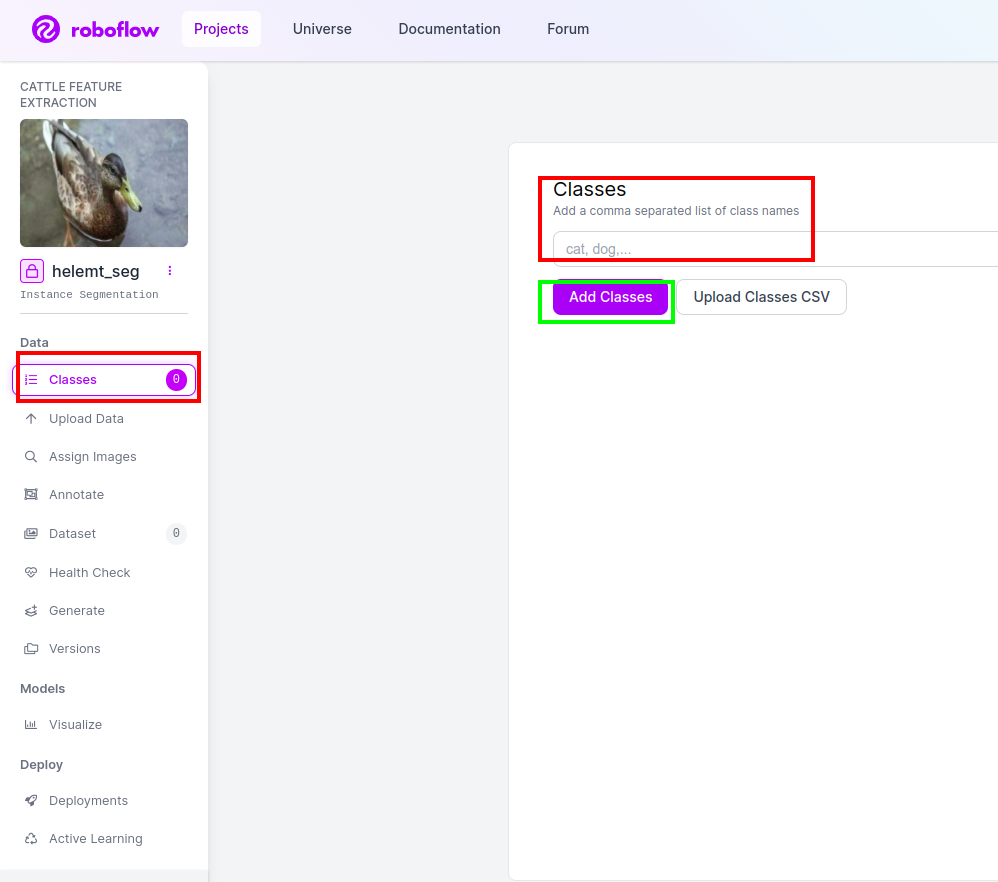
Step4: Add the Class Identify
Then go to the class half on the left aspect of verify the pink field. and write the category title as duck, after clicking the inexperienced field.
Now our setup is full and the following half just like the annotation half additionally easy.
Step5: Begin the annotation half
Go to the annotation possibility I marked within the pink field after which click on the beginning the annoataion half as I marked within the inexperienced field.
Click on the primary picture you may see this UI. After seeing this click on the guide annotation possibility.
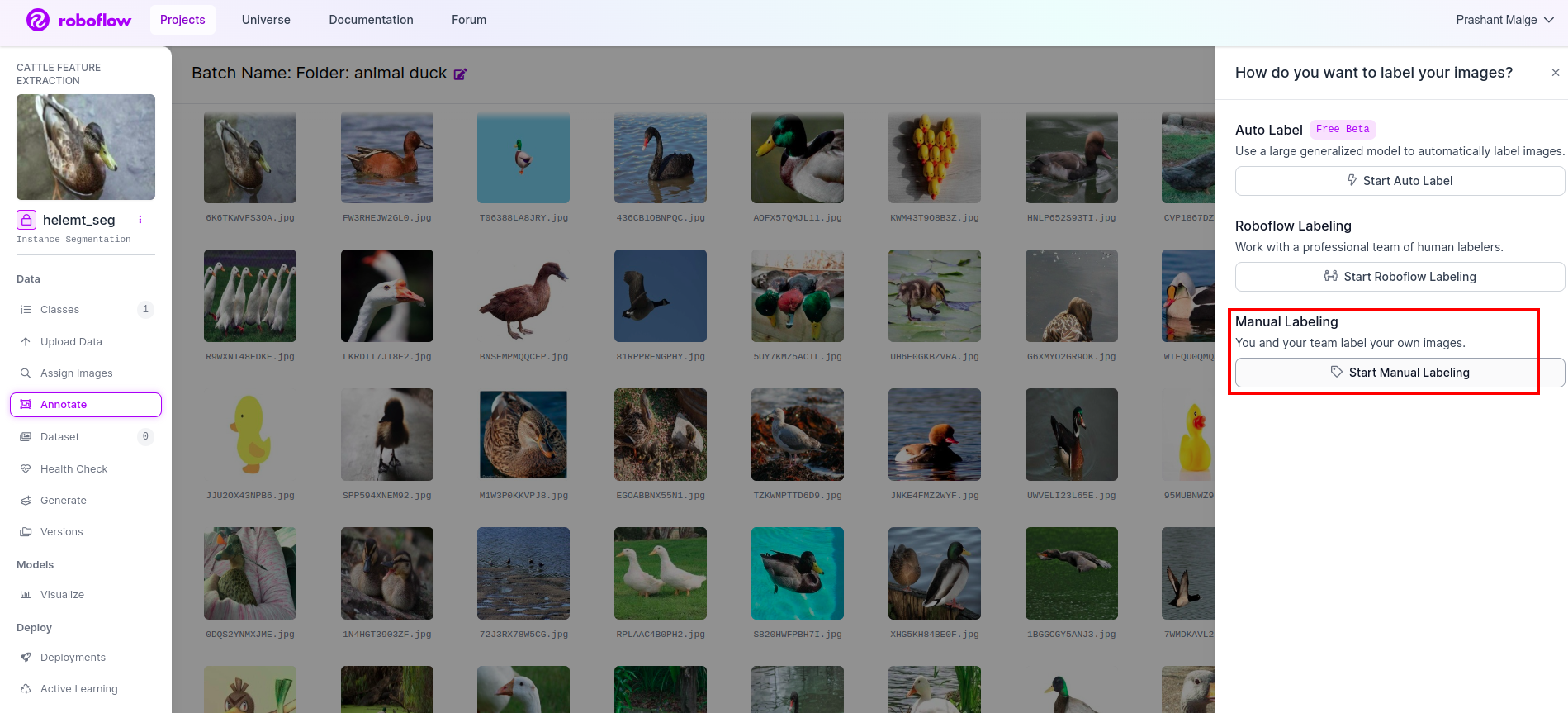
Then add your e-mail id or your teammate’s title so you may assign the duty.
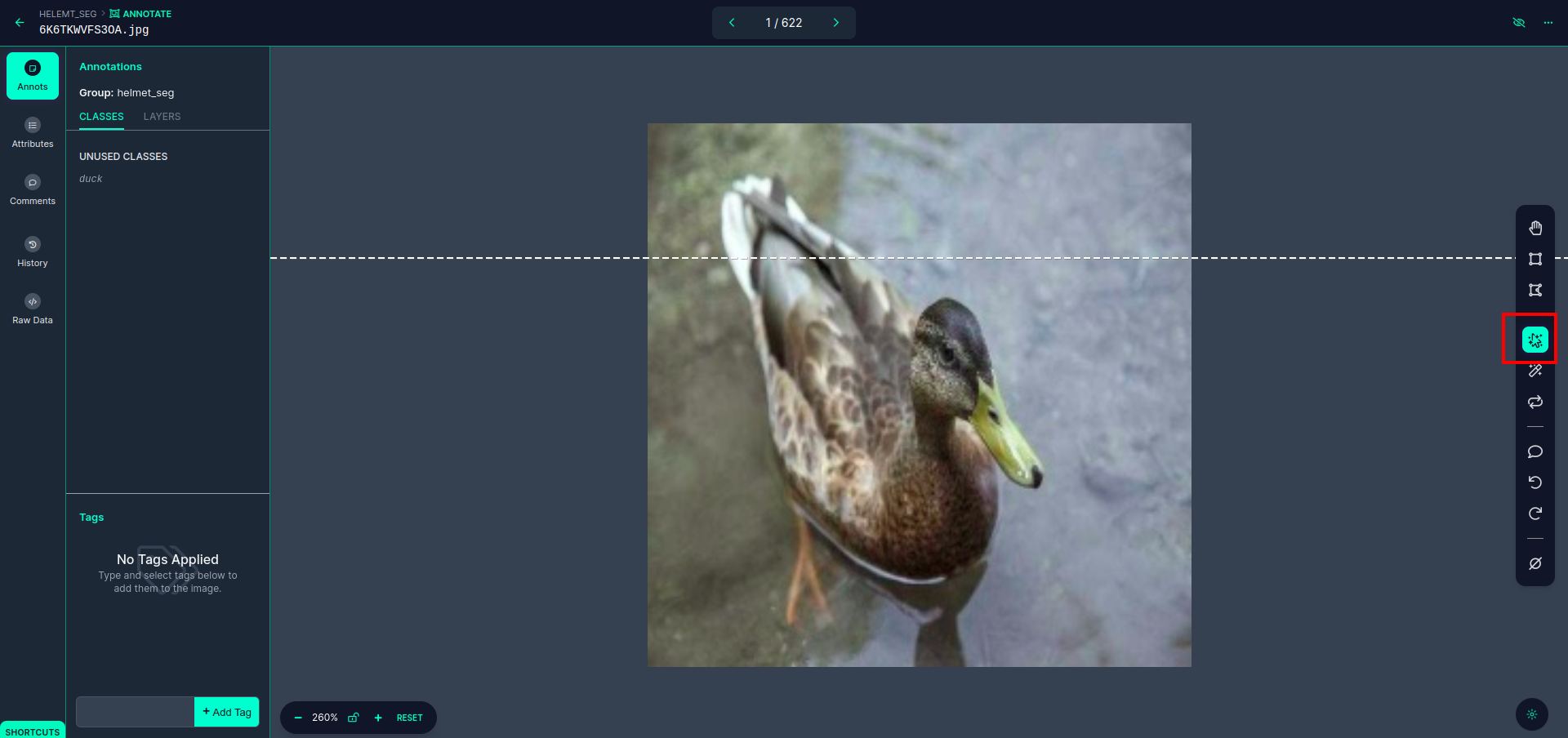
Click on the primary picture you may see this UI. right here click on the pink field so you may choose the multi-polynomial mannequin.
After clicking the pink field, choose the default mannequin and click on on the duck object. This can mechanically phase the picture. Then, click on on the following half and reserve it. You’ll then see the left aspect marked in a pink field, the place you may see the category title.
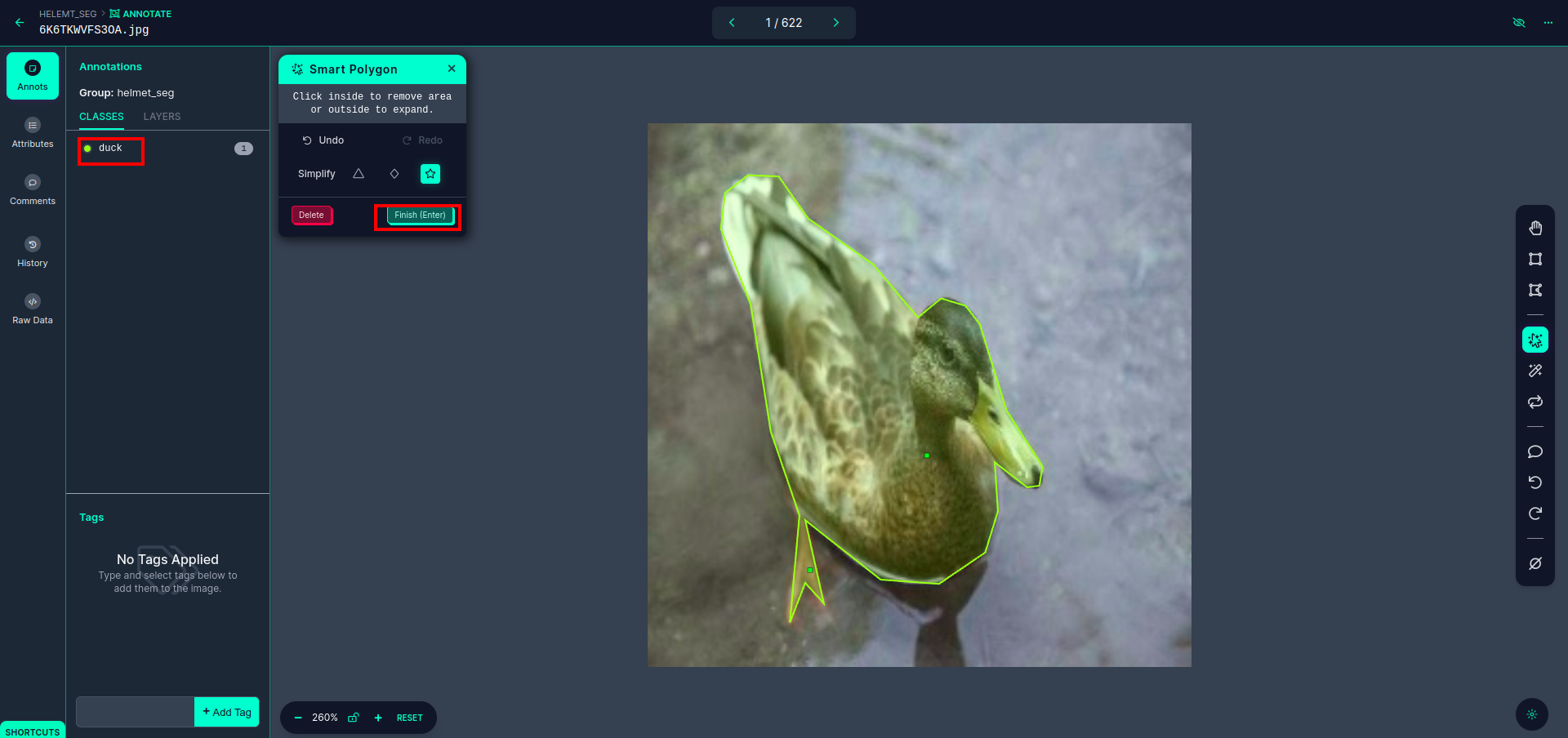
Click on the save&enter possibility. annotate the all the pictures.
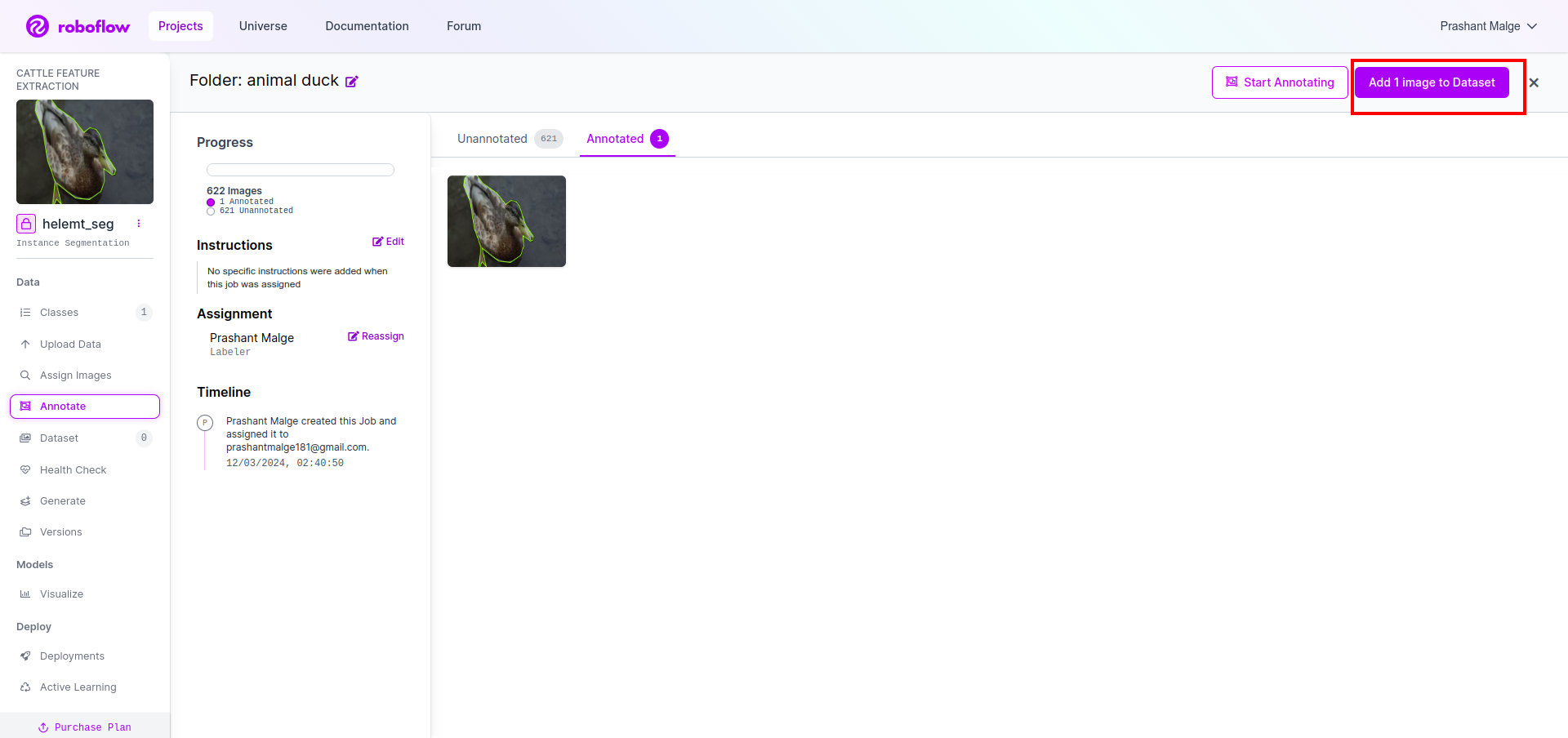
Add the pictures for YOLOv8 format. On the appropriate aspect, you will notice the choice so as to add photos within the annotation part. Right here, two elements are created: one for annotated photos and one for unannotated photos.
- First, click on the left-side “annotate” possibility then add the pictures to the dataset.
- Then click on the following “Add Photographs“.
Now final, we create the dataset so click on the “Generate” possibility on the left aspect then verify the choice and press the conitune possibility.
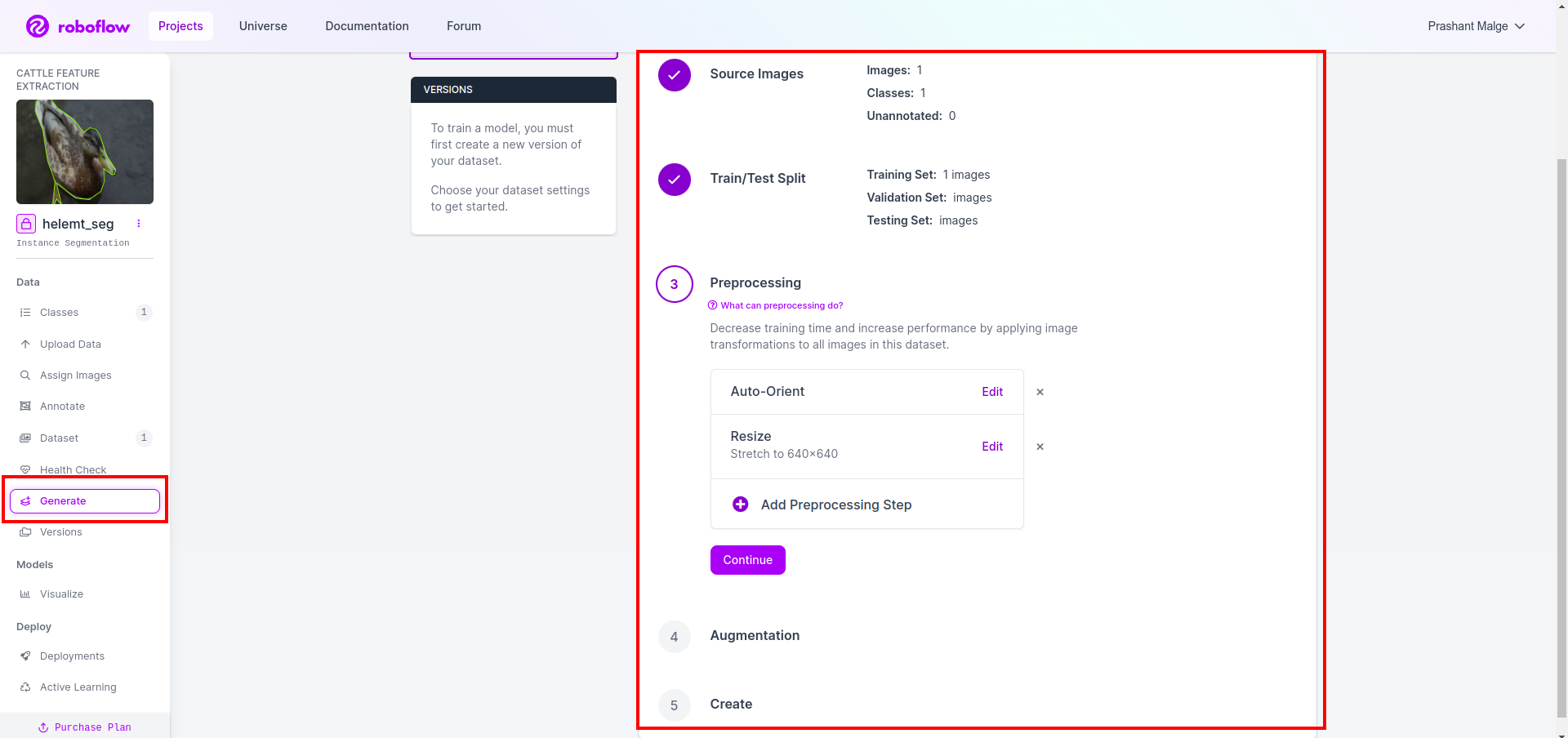
You then get the UI of the dataset break up possibility right here you may verify the practice, take a look at and val folders their photos mechanically break up. and click on the above pink field Export Dataset possibility and obtain the zip file. the zip file folder construction is like…
root_file.zip
│
├── take a look at
│ ├── Photographs
│ └── labels
│
├── practice
│ ├── Photographs
│ └── labels
│
├── val
│ ├── Photographs
│ └── labels
│
├── knowledge.yaml
└── Readme.roboflow.txt
Step6: Write the script for coaching the picture segmentation mannequin
On this half first, you create the Google Collab file utilizing Drive then add your dataset. and moute the Google Drive utilizing Google Collab.
1. Use this command for Mount Google Drive
from google.colab import drive drive.mount('/content material/gdrive')2. Outline knowledge listing Use the Fixed variable.
DATA_DIR = '/content material/drive/MyDrive/YoloV8/Information/'3. Putting in the required bundle, Set up ultralytics
!pip set up ultralytics4. Importing the libraries
import os from ultralytics import YOLO5. Load pre-trained YOLOv8 mannequin(right here we now have completely different mannequin additionally verify the official documentation there you may see the completely different mannequin)
mannequin = YOLO('yolov8n-seg.pt') # load a pretrained mannequin (advisable for coaching)
6. Practice the Mannequin
mannequin.practice(knowledge='/content material/drive/MyDrive/YoloV8/Information/knowledge.yaml', epochs=2, imgsz=640) # Replace the trail & and be part of this line collectively No verify your drive The mannequin title folder is created and there mannequin is saved for the prediction we wish this mannequin.
7. Predict the Mannequin
#Replace the trail
model_path = '/content material/drive/MyDrive/YoloV8/Mannequin/train2/weights/final.pt'
#Replace the trail
image_path = '/content material/drive/MyDrive/YoloV8/Information/val/1be566eccffe9561.png' img = cv2.imread(image_path)
H, W, _ = img.form mannequin = YOLO(model_path) outcomes = mannequin(img) for end in outcomes: for j, masks in enumerate(end result.masks.knowledge): masks = masks.numpy() * 255 masks = cv2.resize(masks, (W, H)) cv2.imwrite('./output.png', masks)Right here you may see the segmentation picture is saved.
Now lastly we are able to construct each reside detection and picture segmentation fashions.
Conclusion
On this weblog, we discover reside object detection and picture segmentation with YOLOv8. For reside detection, we import a pre-trained YOLOv8 mannequin and make the most of the pc imaginative and prescient library, OpenCV, to open the digital camera and detect objects. Moreover, we create a Streamlit utility for a gorgeous consumer interface.
Subsequent, we delve into picture segmentation with YOLOv8. We import a pre-trained mannequin and carry out switch studying on a customized dataset. Previous to this, we explored Roboflow for dataset annotation, offering an easy-to-use various to instruments like LabelImg.
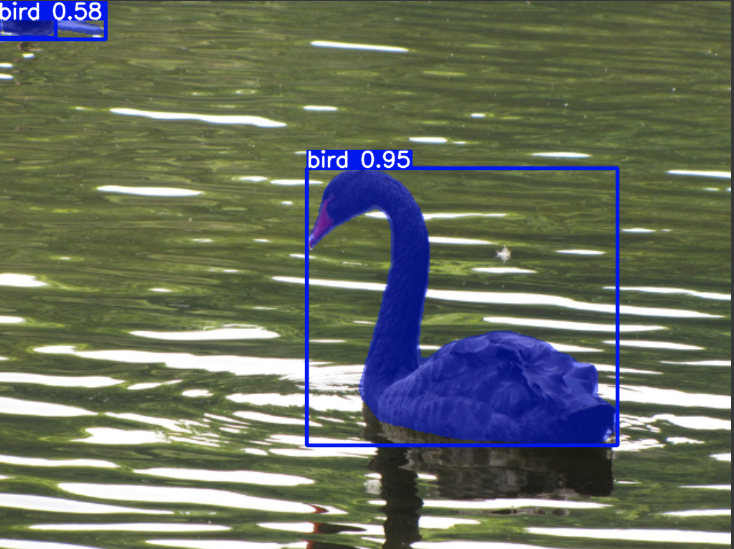
Lastly, we predict a picture containing a duck. Though the item within the picture seems to be a hen, we specify the category title as “duck” for demonstration functions.
Key Takeaways
- Studying about object detection fashions like Quicker R-CNN, SSD, and the most recent YOLOv8.
- Understanding the annotation instrument Roboflow and its function in creating datasets for YOLOv8 segmentation fashions.
- Exploring reside object detection utilizing OpenCV (cv2) and Supervision, enhancing sensible abilities.
- Coaching and deploying a segmentation mannequin utilizing YOLOv8, gaining hands-on expertise.
Ceaselessly Requested Questions
A. Object detection includes figuring out and finding a number of objects inside a picture, sometimes by drawing bounding packing containers round them. Picture segmentation, alternatively, divides a picture into segments or areas primarily based on pixel similarity, offering a extra detailed understanding of object boundaries.
A. YOLOv8 improves upon earlier variations by incorporating developments in community structure, coaching strategies, and optimization. It could supply higher accuracy, velocity, and effectivity in comparison with YOLOv3.
A. YOLOv8 can be utilized for real-time object detection on embedded units, relying on the {hardware} capabilities and mannequin optimization. Nonetheless, it might require optimizations comparable to mannequin pruning or quantization to realize real-time efficiency on resource-constrained units.
A. Roboflow affords intuitive annotation instruments, dataset administration options, and help for varied annotation codecs. It streamlines the annotation course of, allows collaboration, and gives model management, making it simpler to create and handle datasets for pc imaginative and prescient tasks.