The article beneath was contributed by Timothy Malche, an assistant professor within the Division of Laptop Functions at Manipal College Jaipur.
Keypoint detection in laptop imaginative and prescient is a way used to determine distinctive factors or places in a picture that can be utilized as references for additional evaluation comparable to object recognition, pose estimation, or movement monitoring and so forth.
On this weblog submit we are going to stroll by way of the way to use key level labeling to coach a pc imaginative and prescient mannequin to determine water bottle factors of curiosity.
We’ll then use this info to estimate the orientation of the water bottle. The orientation of a water bottle refers to its rotational alignment or positioning relative to a reference body or axis. In less complicated phrases, it is the angle at which the water bottle is tilted or turned with respect to a sure route.
For instance, in the event you place a water bottle on a desk and it is completely upright with its base parallel to the desk floor, its orientation can be thought-about 90 levels. Should you then tilt the bottle barely to the left or proper, its orientation would change accordingly.
In laptop imaginative and prescient or robotics contexts, figuring out the orientation of a water bottle would possibly contain measuring the angle at which it is tilted or rotated from a predefined reference route. This info might be helpful for numerous functions comparable to object detection, manipulation, or monitoring in automated programs.
Figuring out the orientation of objects, comparable to a water bottle or every other object, has quite a few real-world functions throughout numerous domains comparable to:
- In robotics, the commercial robots want to know objects with precision to carry out duties comparable to meeting, sorting, packaging, or inserting objects in designated places.
- In cargo and logistics, when loading gadgets into transport containers, vehicles, or cargo planes, understanding the orientation of packages might help maximize house utilization.
Methodology to Estimate Bottle Orientation
First, we have to prepare a keypoint detection mannequin to acknowledge the highest and backside keypoints of a water bottle. We’ll stroll by way of the way to prepare the mannequin within the subsequent step. This mannequin will give us the x and y coordinates for these keypoints. Then, utilizing trigonometry, calculated the angle of the road phase fashioned by two factors (x1, y1) and (x2, y2) to estimate the orientation of the water bottle as given beneath:
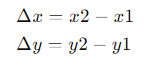
First, discover the distinction within the x-coordinates (Δx) and the distinction within the y-coordinates (Δy):
Then, use the arctangent operate to seek out the angle:

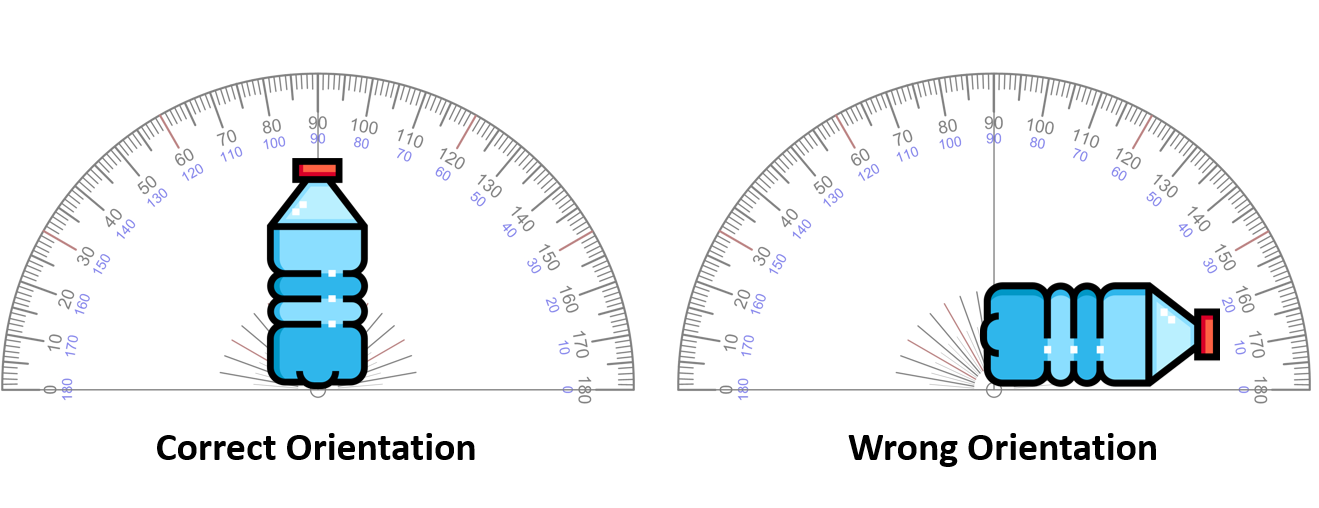
This info is used to estimate the orientation of object, a water bottle with prime and backside keypoints in our instance. If the bottle is upright with its base, registering an angle of 90 levels, it signifies appropriate orientation; in any other case, it is deemed incorrect.
This idea could also be used to estimate orientation of any bodily object provided that the keypoints of objects are accurately recognized.
Steps for constructing the mission
For constructing the mission, following steps are used.
- Gather and label a water bottle dataset
- Prepare a keypoint detection mannequin
- Construct software to detect keypoints and estimate orientation of water bottle
Step #1: Gather and label a water bottle dataset
The dataset of water bottle is manually collected. The dataset accommodates water bottles positioned in three totally different orientations as proven in picture beneath

After accumulating the dataset, it’s uploaded to Roboflow mission for labelling and coaching. To label the dataset, first a keypoint skeleton must be created. It’s possible you’ll discuss with this article for extra particulars on the way to create and label keypoint mission utilizing Roboflow.
For this mission, I’ve outlined a keypoint skeleton describing the highest and backside factors as proven in following picture.
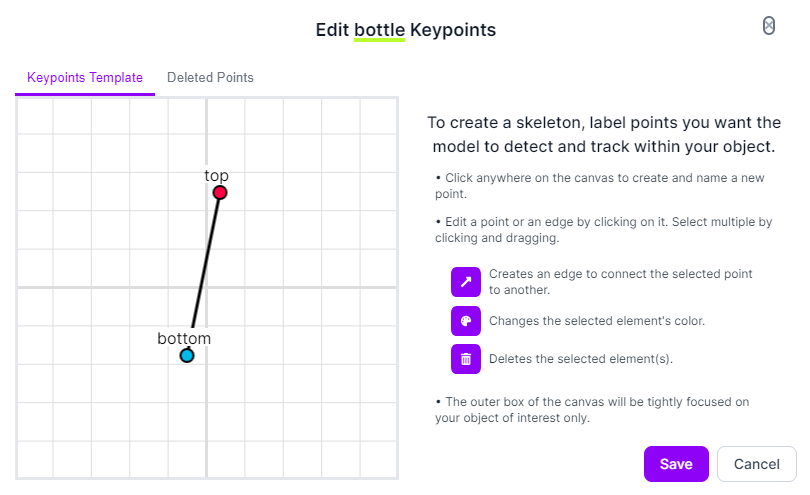
As soon as the keypoint skeleton class is outlined, it’s used to label every picture by dragging the bounding field and positioning “prime” and “backside” keypoints to its desired place as proven in following picture.
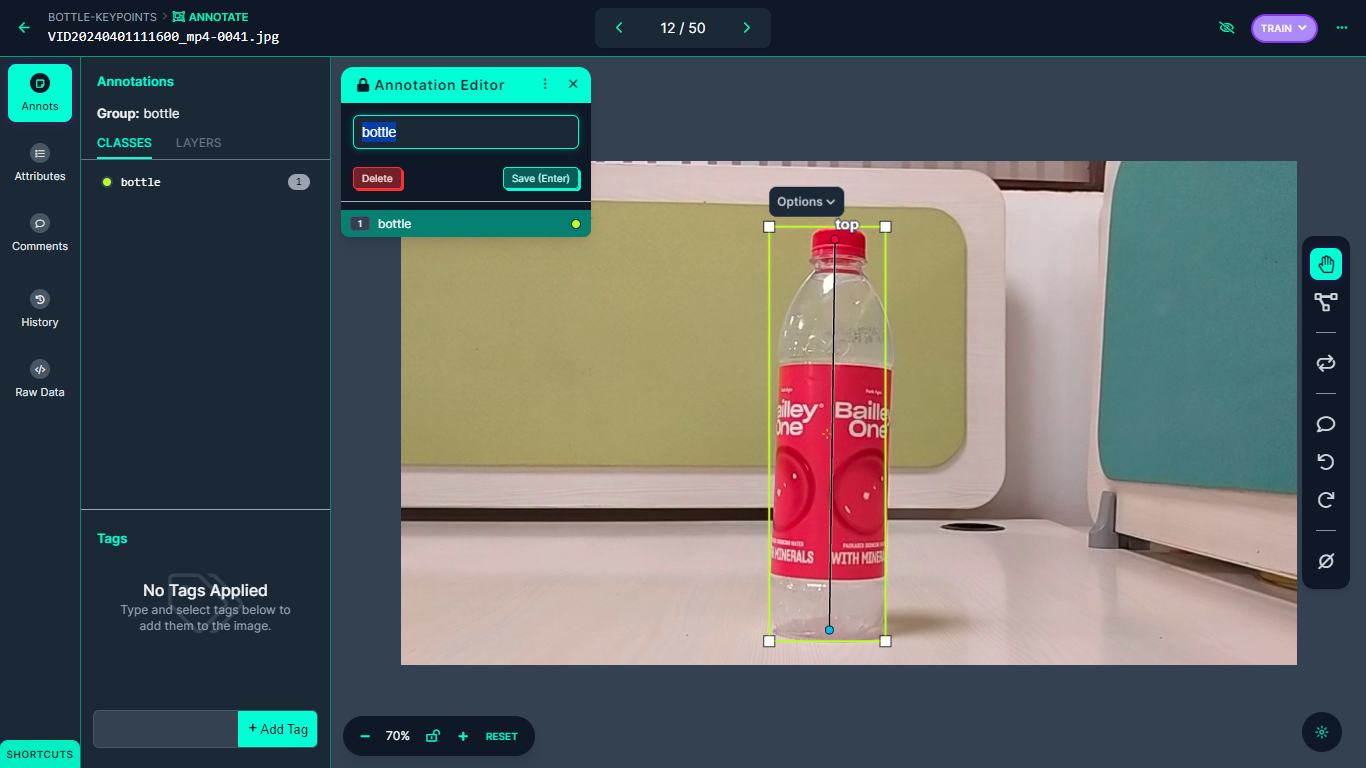
All the photographs are labeled utilizing keypoint class and the dataset was generated.

Step #2: Prepare a keypoint detection mannequin
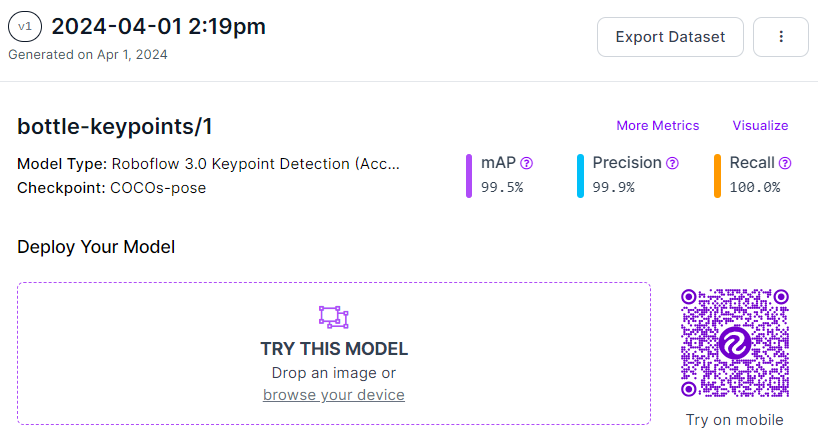
Upon ending the labeling course of, a dataset model is generated, and the mannequin undergoes coaching utilizing the Roboflow auto-training characteristic. The achieved coaching accuracy is 99.5%.
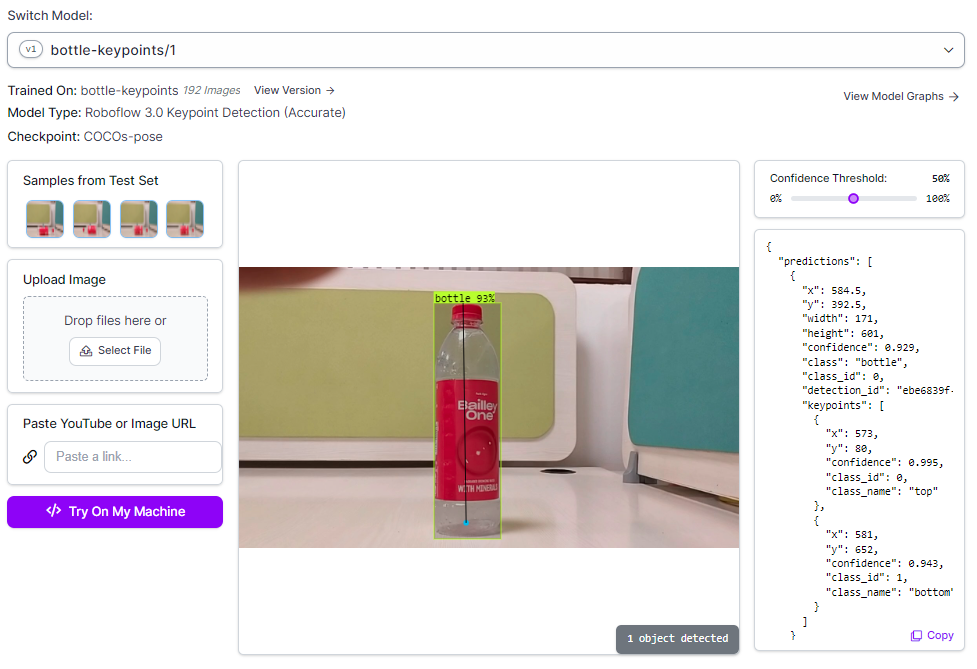
The mannequin is routinely deployed to a cloud API. Roboflow provides a variety of choices for testing and deploying the mannequin, comparable to stay testing in an internet browser and deployment to edge gadgets. The accompanying picture illustrates the mannequin present process testing by way of Roboflow’s internet interface.
Step #3: Construct software to detect keypoints and estimate orientation of water bottle
This step entails developing the appliance to detect the keypoints of a water bottle in a stay digital camera feed. Initially, we’ll develop a fundamental Python script able to detecting the keypoints of a water bottle and displaying them with bounding packing containers on a picture. We’ll use the offered take a look at picture for this objective.

Fist, set up the Roboflow Python package deal and the Inference SDK package deal, with which we are going to run inference on our mannequin:
pip set up roboflow inference-sdk inferenceWe will then write a script to run inference. Create a brand new file and add the next code:
from inference_sdk import InferenceHTTPClient
import cv2
import json
CLIENT = InferenceHTTPClient(
api_url="https://detect.roboflow.com",
api_key="YOUR_API_KEY"
)
# infer on an area picture
json_data = CLIENT.infer("bottle.jpg", model_id="bottle-keypoints/1")
print(json_data)
The above code provides output in JSON format as following. This prediction result’s saved in json_data variable.
{'time': 0.09515731000010419, 'picture': {'width': 800, 'top': 360}, 'predictions': [{'x': 341.5, 'y': 196.5, 'width': 309.0, 'height': 85.0, 'confidence': 0.9074831008911133, 'class': 'bottle', 'class_id': 0, 'detection_id': 'bff695c1-df86-4576-83ad-8c802e08774e', 'keypoints': [{'x': 186.0, 'y': 198.0, 'confidence': 0.9994387626647949, 'class_id': 0, 'class_name': 'top'}, {'x': 496.0, 'y': 202.0, 'confidence': 0.9994300007820129, 'class_id': 1, 'class_name': 'bottom'}]}]}We’ll convert this to a JSON string (in following code) after which use the string to attract bounding packing containers and keypoints on our take a look at picture output.
To show the picture with the bounding field and key factors returned by our keypoint detection mannequin, we have to load the picture. Then, we have to iterate by way of prediction outcomes saved in JSON string and draw bounding packing containers and keypoints as proven within the following code.
json_string = json.dumps(json_data)
information = json.hundreds(json_string )
picture = cv2.imread("bottle.jpg")
for prediction in information['predictions']:
x = int(prediction['x'])
y = int(prediction['y'])
width = int(prediction['width'])
top = int(prediction['height'])
x1 = int(x - (width / 2))
y1 = int(y - (top / 2))
x2 = int(x + (width / 2))
y2 = int(y + (top / 2))
# Draw bounding field
cv2.rectangle(picture, (x1, y1), (x2, y2), (0, 255, 0), 2)
# Draw keypoints
for keypoint in prediction['keypoints']:
keypoint_x = int(keypoint['x'])
keypoint_y = int(keypoint['y'])
class_name = keypoint['class_name']
if class_name == 'prime':
shade = (0, 0, 255) # Pink shade for prime keypoints
elif class_name == 'backside':
shade = (255, 0, 0) # Blue shade for backside keypoints
else:
shade = (0, 255, 0) # Inexperienced shade for different keypoints
cv2.circle(picture, (keypoint_x, keypoint_y), 5, shade, -1)
cv2.imshow("Picture with Bounding Packing containers and Keypoints", picture)
cv2.waitKey(0)
cv2.destroyAllWindows()Right here is the output from our code:

Subsequent, we’ll replace this code to carry out inference on a video stream. We’ll make the most of a webcam to seize the video and execute inference for every body of the video.
Create a brand new file and add the next code:
from inference_sdk import InferenceHTTPClient
import cv2
import json
CLIENT = InferenceHTTPClient(
api_url="https://detect.roboflow.com",
api_key="YOUR_API_KEY"
) def calculate_angle(x1, y1, x2, y2):
# Calculate the variations in coordinates
delta_x = x1 - x2
delta_y = y1 - y2 # Calculate the angle utilizing arctan2 and convert it to levels
angle_rad = math.atan2(delta_y, delta_x)
angle_deg = math.levels(angle_rad) # Make sure the angle is between Zero and 360 levels
mapped_angle = angle_deg % 360
if mapped_angle < 0:
mapped_angle += 360 # Guarantee angle is optimistic return mapped_angle cap = cv2.VideoCapture(0)
ret, body = cap.learn() if not ret:
break # Carry out inference on the present body
json_data = CLIENT.infer(body, model_id="bottle-keypoints/1")
# Convert JSON information to dictionary
information = json.hundreds(json.dumps(json_data))
# Variables to retailer backside and prime keypoint coordinates
bottom_x, bottom_y = None, None
top_x, top_y = None, None
# Iterate by way of predictions
for prediction in information['predictions']:
x = int(prediction['x'])
y = int(prediction['y'])
width = int(prediction['width'])
top = int(prediction['height']) x1 = int(x - (width / 2))
y1 = int(y - (top / 2))
x2 = int(x + (width / 2))
y2 = int(y + (top / 2)) # Draw bounding field
cv2.rectangle(body, (x1, y1), (x2, y2), (0, 255, 0), 2) # Draw keypoints
for keypoint in prediction['keypoints']:
keypoint_x = int(keypoint['x'])
keypoint_y = int(keypoint['y'])
class_name = keypoint['class_name']
if class_name == 'prime':
shade = (0, 0, 255) # Pink shade for prime keypoints
top_x, top_y = keypoint_x, keypoint_y
elif class_name == 'backside':
shade = (255, 0, 0) # Blue shade for backside keypoints
bottom_x, bottom_y = keypoint_x, keypoint_y
else:
shade = (0, 255, 0) # Inexperienced shade for different keypoints
cv2.circle(body, (keypoint_x, keypoint_y), 5, shade, -1)
if bottom_x shouldn't be None and bottom_y shouldn't be None and top_x shouldn't be None and top_y shouldn't be None:
angle = calculate_angle(bottom_x, bottom_y, top_x, top_y)
# Show the angle on the body
cv2.putText(body, "Angle: {:.2f} levels".format(angle), (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, ( 251, 241, 25), 2)
# Test for orientation
if 0 <= angle <= 85 or 95 <= angle <= 185: # Angle near Zero or 180 levels
cv2.putText(body, "Unsuitable orientation", (50, 100), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
elif 85 <= angle <= 95 or 265 <= angle <= 275: # Angle near 90 levels
cv2.putText(body, "Appropriate orientation", (50, 100), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
# Show the body with predictions and angle
cv2.imshow('Webcam', body)
# Test for 'q' key press to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break # Launch the webcam and shut OpenCV home windows
cap.launch()
cv2.destroyAllWindows()Inside our code, we use a operate to calculate the angle between the important thing factors of our mannequin. Utilizing this angle, we’ll decide the proper orientation of the water bottle.
We will open our video stream and seize frames from our webcam, carry out inference on every body, and save the prediction outcomes. We then draw bounding field and keypoints on every body of the captured video.
After this, we are going to compute the angle and show it onto the video body.
Then, we are able to assess the orientation, whereby if the bottle is angled at 90 levels, it is deemed accurately positioned; nonetheless, if it is tilted near Zero or 180 levels, it is thought-about incorrectly positioned.
Right here is the ultimate output of our system:
Conclusion
This weblog submit has offered a complete information on developing a keypoint detection mission to find out the orientation of objects, with a concentrate on a water bottle in our instance, utilizing Roboflow. Making certain correct orientation detection of an object is essential, significantly in robotic imaginative and prescient functions.
In duties comparable to greedy, manipulation, and meeting, understanding the orientation of objects permits robots to deal with them accurately. For instance, in a producing setting, a robotic arm wants to choose up objects with the proper orientation to position them precisely in meeting processes.
Furthermore, in situations the place objects must be sorted or inspected primarily based on their orientation, dependable orientation detection is indispensable. For example, in warehouse automation, robots have to orient packages accurately for scanning or stacking functions.
The dataset and laptop imaginative and prescient mannequin for this mission is accessible at Roboflow Universe and all of the code is accessible right here.